
9.2.2018
Our proposal for the Amazon
Research Award
project "Learning Scene Parsing for Cluttered Bin Picking" was funded.
![]()

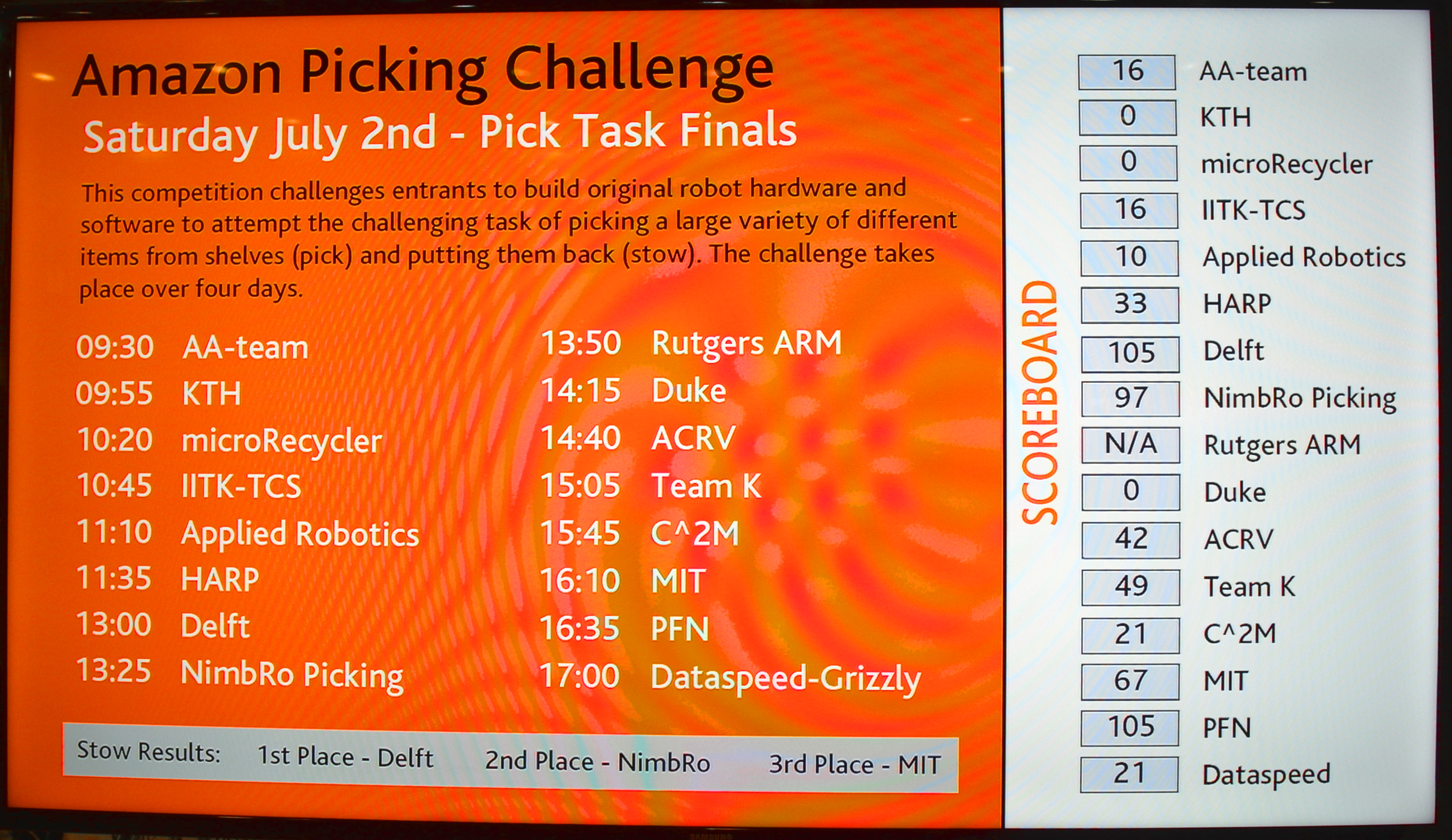
Our team NimbRo Picking won the 2nd price in the Pick task and came in 2nd in the final Stow and Pick task.
21.5.2018
Invited presentation at the ICRA
2018 Workshop on Advances in Robotic Warehouse Automation,
Brisbane, Australia:
"Team
NimbRo Picking at ARC 2017:
Fast Learning Semantic Perception and Coordinating Two Arms"
12.1.2018
The paper
Max Schwarz, Christian Lenz, German Martin Garcia, Seongyong Koo, Arul
Selvam Periyasamy, Michael Schreiber, and Sven Behnke:
Fast Object Learning and
Dual-arm Coordination for Cluttered Stowing, Picking, and Packing
has been accepted for the IEEE International Conference on Robotics and
Automation (ICRA), Brisbane, Australia, to appear May 2018.
[ICRA_2018_Schwarz_ARC.mp4]
30.7.2017
In the Finals, both stow and pick needed to be performed by the robotic
system. Our robot stored 14 of the 16 items provided in a tote into our
storage system, where additional 16 items were placed manually before.
Afterwards, it picked eight of the possible nine requested items and
placed them in the target card boxes. This resulted in 235
points,
second only to ACRV from Australia, who reached 272 points. The missing
ninth item – a mesh cup made from thin wires – was grasped by one of
the manipulators, but then put back into the storage system due to a
failed weight check.






29.7.2017
Our team had a great run in the Picking task evaluation. All requested
items were picked and placed successfully in the three target card
boxes. The score reached was 245, second only to team Nanyang
(Singapore, score 257).
28.7.2017
After recovering from a
serious system breakdown, which
occurred due to an electrical short cut, our system performed the Stow
task evaluation. The task was to stow items provided chaotically in a
tote into the storage system. Due to an issue in the weight file, the
measured weights of the picked objects were inconsistent with the
expected weights and the manipulators kept dropping the picked items
back into the tote, resulting in a score of only 20 points.




27.7.2017
In the official practice run, our team reached the top score (150),
followed by team IFL PiRo (KIT, Germany, 140), and team Nanyang (Nanyang
Technological University, Singapore, 120). Teams could chose the
practice task and the scores do not count towards the competition
results. The score is promising, but there is still room for
improvement.
26.7.2017
Our system performed some practice runs. Many items were
sucessfully
picked and placed, but there is still much room for improvement.
25.7.2017
Our team arrived at the RoboCup venue in Nagoya, Japan, and started to
assemble and set-up the developed robotic system. Our system consist of
two Universal Robots UR5 manipulators which are equipped with a
flexible suction finger and a second finger for pinch grasps, RGB-D
gantry sensors consisting of a Nikon DSLR camera and a Photoneo® PhoXi®
3D Scanner XL, a GPU server with four NVidia Titan GPUs, and scales
below totes and boxes.
This year, as final the Stow and Pick has been added, where the robotic
system must pick the items that it stored before. Teams can design
their own storage system, subject to space restrictions. The density of
items in the tote and the storage systems has been increased. Maybe the
most challenging aspect is that not all items are known in advance,
but half of the items are introduced to the system only few minutes
before the competition run.



Acknowledgements
We gratefully acknowledge Photoneo
s. r. o. who provided for our system a Photoneo® PhoXi® 3D
Scanner XL free of charge and Amazon Robotics
who provided travel support.
26.5.2017
Our Amazon
Picking Challenge 2016 software was released.
26.4.2017
The paper Max Schwarz, Anton Milan, Arul Selvam Periyasamy, and Sven
Behnke:
RGB-D Object Detection
and Semantic Segmentation for Autonomous Manipulation in Clutter
has been accepted for International Journal of Robotics Research
(IJRR), Sage Publications, to apprear 2017.
The abstract Max Schwarz and Sven Behnke:
Data-efficient Deep
Learning for RGB-D Object Perception in Cluttered Bin Picking
has been accepted for the Warehouse Picking Automation Workshop (WPAW),
IEEE International Conference on Robotics and Automation
(ICRA), Singapore, May 2017.
15.1.2017
The paper by Max Schwarz, Anton Milan, Christian Lenz, Aura
Munoz, Arul
Selvam
Periyasamy, Michael Schreiber, Sebastian Schüller, and Sven Behnke: NimbRo Picking:
Versatile Part Handling for Warehouse Automation
has been
accepted for the IEEE International Conference on Robotics and
Automation
(ICRA), Singapore, May 2017.
Finalist for Best Automation Paper Award.
[Video]
21.8.2016
We presented our approach to the APC tasks in the CASE Workshop on Automation
for Warehouse Logistics, Fort Worth, Texas, USA.
[Presentation
slides]
2.7.2016
In the Picking task, our robot picked 10 of the 12 items from the shelf and placed them in the tote. It received 97 points, coming in third in the overall ranking, next to TU Delft and the Japanese Team PFN.



1.7.2016
Our team came in second in the Stowing task of the Amazon Picking Challenge, next only to the team of TU Delft. All but one object has been stowed.



30.6.2016
We used our practice run for the Stowing task. Our system was working quite well. NimbRo recived 123 points, followed by Duke (15 points) and MIT (10 points).
29.6.2016
Our team made good progress in setting up the robot for the
challenge. Here is a first video of picking from the tote.
28.6.2016
Our team NimbRo Picking arrived at Leipziger Messe and is setting up the robot for the Amazon Picking Challenge.


27.5.2016
Our team NimbRo Picking is qualified for the Amazon Picking Challenge 2016, which will take place June 28th - July 3rd, 2016 at Leipziger Messe, colocated with RoboCup 2016. The challenge tasks consist of picking a large variety of objects from a shelf and placing them in a tote, and of picking unordered objects from a tote and stowing them in the shelf.


Universität Bonn, Institute for Computer Science, Departments: I, II, III, IV, V, VI; Team NimbRo; Robotics in Bonn